


Memsic 2125 ivmeölçer Örneği
Memsic 2125 ivmeölçer. Memsic 2125, artı veya eksi 2g’ye kadar olan hızlanmayı ölçebilen iki eksenli bir ivme ölçerdir . Basit bir dijital arayüze sahiptir: süresi her bir eksen için bir adet pim yayar, bu sürenin uzunluğu o eksenin hızlanmasına karşılık gelir. Bu darbenin uzunluğunu ölçerek, pulseIn() işlevini kullanarak, mikrosaniyelerde, hızlanma oranını belirlemek ve bu verileri sizin amaçlarınız için kullanmak mümkündür.
Donanım
- Arduino veya Genuino Kurulu
- Memsic 2125 İvmeölçer
- Bağlantı telleri
- breadboard
“Arduino UNO, elektronik ve kodlamaya başlamak için en iyi tahtadır. Bu, platformla birlikte çalıştığınız ilk deneyiminizse, Arduino UNO, denemelere başlayabileceğiniz en iyi seçimdir. UNO, tüm Arduino ailesinin en çok kullanılan ve içeriği bulunan kartıdır.
Arduino Uno, ATmega328P tabanlı bir mikro denetleyici karttır. 14 adet dijital giriş / çıkış pini (6’sı PWM çıkışı olarak kullanılabilir), 6 analog giriş, 16 MHz kristali, bir USB bağlantısı, bir güç girişi, bir ICSP başlığı ve bir sıfırlama düğmesi vardır. Mikrodenetleyiciyi desteklemek için gereken her şeyi içerir; Başlamak için bir USB kablosuyla bir bilgisayara bağlayın ya da AC-DC adaptörü ya da pille çalıştırın. UNO’yu, yanlış bir şey yapmadan çok fazla endişe etmeden tamir edebilir, en kötü durum senaryosunu değiştirebilirsiniz. Birkaç dolara çip alır ve tekrar kullanabilirsiniz.”
Devre
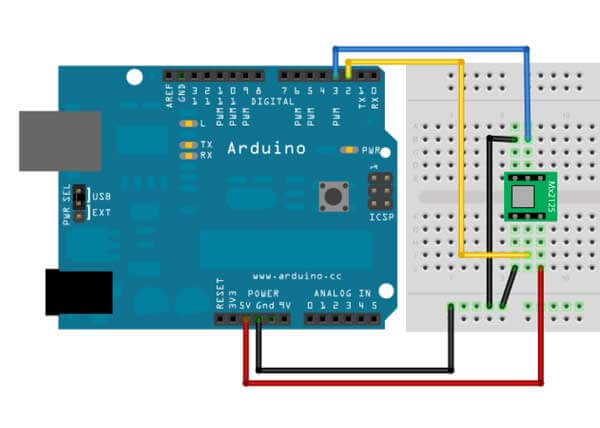
Sensörü breadboard’unuza doğru şekilde yönlendirmek için Memsic üzerindeki küçük üçgeni kullanın. Memsic 2125’in 5V ve GND pinlerini kart üzerindeki güç ve toprak bağlantı noktalarına bağlayın. Kartın dijital pinini 2 ivmeölçerin X çıkış pimine ve dijital pim 3’ü Y pimine bağlayın.
Seri verileri iletebilmesi için Arduino veya Genuino’nuzun bilgisayarınıza bağlı olması gerekir.
Kod
İvmeölçer konumundan okunan değerleri görmek için Arduino Yazılımının Seri Monitörünü (IDE) açın.
/* Memsic2125 Memsic 2125 iki eksenli ivmeölçer okuyun. Puls çıkışını 2125 mili-g'ye (Dünya'nın yerçekiminin 1 / 1000'i) ve onları bilgisayara seri bağlantı. Devre: - Dijital pin 2'ye ivmeölçer X çıkışı - Dijital pin 3'e ivmeölçer çıkışı - + 5V ivme ölçer + V - İvmeölçerin GND'si oluşturuldu 6 Kas 2008 David A. Mellis tarafından değiştirildi 30 Ağu 2011 Tom Igoe tarafından Bu örnek kod kamu malıdır. http://www.arduino.cc/en/Tutorial/Memsic2125 */ // bu sabitler değişmeyecek: const int xPin = 2; // İvmeölçerin X çıkışı const int yPin = 3; // ivmeölçerin Y çıkışı void setup() { // seri iletişimi başlat: Serial.begin(9600); // ivmeölçere bağlı pinleri giriş olarak başlatır: pinMode(xPin, INPUT); pinMode(yPin, INPUT); } void loop() { // Darbe genişliklerini okumak için değişkenler: int pulseX, pulseY; // ortaya çıkan ivmeleri içerecek değişkenler int accelerationX, accelerationY; // x ve y eksenlerinden gelen darbeyi oku: pulseX = pulseIn(xPin, HIGH); pulseY = pulseIn(yPin, HIGH); // darbe genişliğini hızlandırmaya dönüştür // accelerationX ve accelerationY mili-g’dedir: // Dünya'nın yer çekimi 1000 mili-g veya 1 g. accelerationX = ((pulseX / 10) - 500) * 8; accelerationY = ((pulseY / 10) - 500) * 8; // ivme yazdır Serial.print(accelerationX); // sekme karakteri basar: Serial.print("\t"); Serial.print(accelerationY); Serial.println(); delay(100); }
Kaynak:arduino.cc